MİNİ SUMO ROBOT NASIL YAPILIR?
Mini sumo robot yapabilmek için öncelikle kategorinin kurallarına iyice göz atmak gerekiyor. Kurallara göre boyut ve ağırlık kısıtlaması var.1.Kural:Normal sumo robot 10×10×10 cm’lik üzeri açık bir küpün içine sığmalıdır.Bu da bize mini sumomuzun tabanının 10×10 cm’den küçük olması gerektiğini anlatmaktadır.Ancak yükseklik konusunda herhangi bir kısıtlama belirtilmemiş.
2.Kural:Mini sumo robot 500 gramdan ağır olamaz.Bu nedenle boyutlara ve malzeme seçimine önem verilmelidir.Mini sumo robotta iki temel giriş vardır.Bunlardan biri rakibi algılama,ikinci ise siyah pistin etrafındaki beyaz çizgileri algılamaktır.Robotun amacı pistten çıkmadan rakibi pistin dışına atmaktır.Robot bunu yaparken otonom olmalı,piste ve rakibe zarar vermemelidr.Güncel olarak rakibi dışarıya atmak için itme yöntemi kullanılır.Bu nedenle seçilecek motorların hızlı olmasından ziyade,torklu olması önem arzetmektedir.
Aşağıda bir mini sumo robotun basitleştirilmiş kutu diyagramını görebilirsiniz.

Görüldüğü üzere motorlardan herhangi bir geribesleme alınmıyor.Bu nedenle sistem açık çevrim olarak çalışır.Diyagramda Sharp yazılı kutucuk,rakibi algılayan sensörü ifade etmektedir.Bunların ayrıntılarını ve alternatiflerini ileriki bölümlerde anlatacağız.
Mini sumo robotlarla ilgili genel bilgiler verildikten sonra robotu parçalar halinde inceleyeceğiz.Öncelikli olarak
robotu 2 ana bölüme ayırıyoruz.
*Mekanik kısmı
*Devre kısmı
MEKANİK
Öncelikle kasa hakkında genel bir fikir edinebilmemiz için aşağıya birkaç mini sumo robot kasası tasarımı koyacağız.Bu tasarımlar bu zamana kadarki deneyimlerimizle oluşturulmuştur.Ancak mekanik tasarım kişinin tamamen kendi tasarrufunda olup,tasarlayıcı kurallara uygun olan herhangi bir tasarım ile robotu gerçekleyebilir.Mekanik kısmı 4 temel bölümde inceleyebiliriz.
1→Pil yuvaları
2→Motor ve tekerlekler
3→Ana hazne
4→Eğik düzlem
PİLLER VE PİL YUVALARI
Robotta pillerin 2 görevi vardır.Bunlardan biri devreyi beslemek,dieri ise motoru beslemektir.Motorlar 6V,9V,12V,15V,24V…gibi değerlerle çalışır.Devre ise sabitlenmiş (regüle edilmiş)8V ile çalışır.Motorun beslenmesi için motor sürücüsünün VC2 bacağına 6-24V arası bir gerilim verilir.Burada sürücüye verilecek gerilim seçiminde dikkatli olunmalıdır.9V ile çalışan bir motora 6V veya 24V vermek akıllıca bir iş değildir.Ancak motorlara göre pil seçimi yapılır.
9V’lik bir motorun seçildiğini varsayarsak
-8 tane GP 2700 yada 8 tane GP3000 pil kullanılabilir.
-1 tane 11,7V 3 hücreli Li-Po pil kullanılabilir.
-Paralel bağlanmış 4 tane GP9V 1500 mA pil kullanılabilir.
Bunların her birinin olumlu ve olumsuz yanları vardır.Örneğin 8 tane GP+ pil klipsleri LİPO pile göre çok ucuz olmasına rağmen,LİPO’ya göre çok daha güçsüz ve LİPO’dan çok daha ağırdır.
Mini sumo robotta alan kısıtlaması olduğundan pil klipsinin ana haznesinin üzerine,devrenin altına koyulması uygun bir seçimdir.
MOTORLAR VE TEKERLEKLER
Motor ve motora uygun tekerlek seçimi tüm mobil robotlarda çok önemlidir.Motor ve tekerlek seçimi yapılırken ihtiyaca yönelik seçimler yapmak çok önemlidir.Mini sumo robotta ihtiyacımız fazla yer kaplamayan,yüksek torklu,olabildiğince hafif,az güç harcayan motorlardır.Bu bağlamda motor seçimi için şu alternatifler mevcuttur:
-Dişli kutusuz DC motor
-Dişli kutulu DC motor
-Rüdükgürlü motor
-Servo motor
Dişli kutusuz DC motorlar genellikle yüksek hız düşük tork ile çalışırlar.İsteklerimize uygun dişli kutusuz bir DC motor bulmamız zor olabilir.Öte yandan dişli kutulu motorlarda vitesleme denen olay ile hız düşürülüp tork arttırılmaktadır.İhtiyaçlarımıza uygun vites kutulu (dişli kutulu)bir DC motor bulmamız kolaydır.Seçim yapılırken motorun uzunluğunun max 3-4 cm olmasına dikkat edilmelidir.Tekerleklerle beraber motorun uzunluğu 4,5cm’yi aşmamalıdır.DC motoru kontrol etmek için bir sürücü devresine ihtiyaç duyarız.Bu devrenin yapısını ileride açıklayacağız.
Aşağıdaki dişli kutulu motorlar minisumoı için oldukca uygundur:
Diğer alternatifimizse servo motorlardır.Servo motorlar dişli kutularını ve kontrol devrelerini içlerinde barındırırlar.Bu nedenle kullanımları biraz daha kolaydır.Ancak normal bir servo motoru ±180°’lik bir dönme ekseninde hareket etmektedir.Bu nedenle servo motoru robotumuzda kullanabilmek için önce modifiye etmeliyiz.Modifiye etme işlemi ile servoyu durduran çentiği kırarak motorun çok turlu olmasını sağlarız.Servo modifiyesine ilişkin kaynakları internetten bulabilirsiniz.Servoyu modifiye ettikten sonra kullanabilmek için servoyu kara dalgalar göndermemiz gerekmektedir.Bu kare dalgalara PWM (Pulse With Modulation) denmektedir.PIC 16F628A’da PWM modülü olmayan bir mikrodenetleyicide de timer(zamanlayıcı)modüllerini kullanarak üretebiliriz.
Aşağıda uygun Futaba servo motorları görebilirsiniz:
Hedefe yönelik tekerlek seçimi de başarı için büyük önem arzetmektedir.Tekerlekler çok geniş olmamalıdır.(Boyutlar nedeniyle).Tekerlekler motorun makine miline iyi sabitlenmelidir.Tekerleklerin sürtünme katsayıları olabildiğince yüksek olmalıdır.Bununla birlikte tekerlekler piste asla zara vermemelidir.Bu nedenle tekerleklerin dışına zımpara benzeri maddelerce kaplı olması yasaktır.

ANA HAZNE
Kasanın yapılacağı malzeme seçilirken yine amaçlara uygunluk ilkesi göz önünde bulundurulmalıdır.Kasa çok fazla ağır olmamalıdır.Buna karşın dayanıklılıkta ön planda tutulmalıdır.Kasanın yapımında kullanılabilecek bazı malzemeler:
-MDF(tahta)
-BALSA(tahta)
-FOREKS(polimer)
-ALİMUNYUM
Robotun tasarımı yapılırken malzemenin özellikleri ve ebatları göz önünde bulundurulmalıdır.Maddenin yapıştırılabilir olup olmadığınada dikkat edilmelidir.Mini sumo robotun ana haznesi yapılırken foreks ile MDF(kontraplak) yaygın olarak kullanılmaktadır.Bunun nedeni bu malzemelerin hafif,dayanıklı,kesilebilir.vidalanabilir ve yapıştırılabilir olmalarıdır.Kasa yapılırken yapıştırıcı yerine olabildiğince somun ve vida ile tutturma yöntemi kullanılmalıdır.
Kasanın tasarımı üstü açık bir kutu şeklinde olabilir.Parçaların birleştirilmesinde vida kullanılması gerektiğini unutmayınız.Kasada kabloların ve motorların yerleştirilmesi için gerekli boşlukları bırakılmalıdır.

EĞİK DÜZLEM
Diğer robotu egale etmek adına izlenecek stratejilerden en yaygın kullanılanı ince bir eğik düzlem ile diğer robotun altına girip,rakibin itiş gücünü sıfırlayarak galibiyet kazanmaktadır.Bu amaca yönelik olarak ince bir aluminyum levha kullanılabilir.Bu levhanın alt kısmı y=e^(-x) eğrisine benzer biçimde eğilebilir

ELEKTRONİK AKSAM
Devreleri kolayca gerçekleyebilmek için modüler çalışmaya gideceğiz.Yani gerekli devreleri ufak parçalar halinde yapacağız.Devre kısımlarını aşağıdaki gibi kategorize edebiliriz.-Regüle Devresi
-PIC Devresi
-Motor Sürücü Devresi
-Sharp GP2D02 Devresi
-CNY70 Devresi
Aşağıfa devrelerin proteus çizimlerini görebilirsiniz. İlerleyen zamanlarda fotoğraf olarak da eklentiler koyacağız =)
7805’Lİ 5V REGÜLE DEVRESİ
Bu regüle devresindeki olay ise devre 6-12V arası pil beslenmesini filtrelenmiş +5V’a dönüştürmektedir.
PIC DEVRESİ
PIC devresi robotun kontrolorunun yani karar mekanizmasının bulunduğu devredir. PIC devresinde PIN çıkışlarını ve beslemeleri klemenslerle ve soketlerle yapmak cok büyük kolaylıklar sağlayacaktır.
Devrede gördüğünüz gibi PIC'in tüm çıkışlarını sokete bağladık, bu sayede ihtiyaca göre bağlantı gerçekleştirebiliyoruz. Ayrıca modülerlik bakımından da bu iyi bir seçim oluyor

MOTOR SÜRÜCÜ DEVRESİ
PICden en fazla 5V- 25 mA akım cekebiliriz. Oysa bir motorun çalışması için daha fazla akımlar ya da daha yüksek gerilimler gerekebilir. PICden gelen sinyalleri yükseltmek için motor sürücü devresi kullanıyoruz. İç yapı itibariyle bir H BRIDGE devresi olan bu devreler yüksek akımlara karşı dayanıklıdır. Proteusta L293D olmadıgı için ben L298 devresi çizdim. L298 entegresi L293Dnin yüksek akım verebilenidir.( Imax = 3A )

ama biz minisumoda l293 d kullanacagımız için internetten çaldığım giriş cıkış olayını koyuyorum buraya...

birbaşka çizim =) :

Geriye CNY70 ve SHARP devreleri ile PROGRAMLAMA kısmı kaldı =)
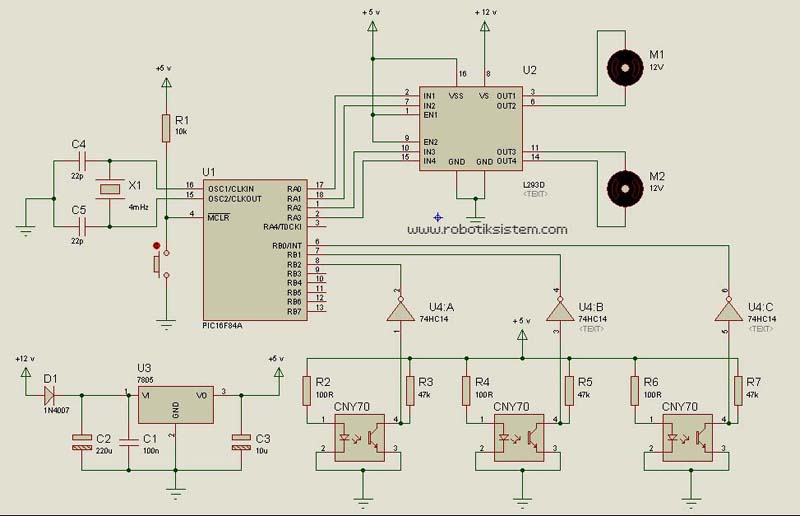
CNY70
Bu sensörler kontrast sensörleri olup, minisumo robotta dohyo kenarındaki çizgileri algılamak amacıyla kullanılır. Sensör ile ilgili ayrıntılı bilgiyi sensörün datasheetinden bulabilirsiniz. Aşağıda sensör devresinin devre şeması bulunmaktadır.